MODEL DUNIA BERGERAK DARI PREDIKSI KE PERENCANAAN, HWM DAN TANTANGAN KONTROL JANGKA PANJANG
Pada tanggal 3 April NYU dan tim Meta FAIR menerbitkan Perencanaan Hierarkis dengan Model Akhir Dunia (HWM). Alamat asli: (https: / / arxiv.org / abs / 2604.03208) Kertas tidak terus fokus pada menghasilkan gambar yang lebih realistis dari masa depan, tetapi malah beralih ke tantangan implementasi lama-berdiri dari model dunia. Setelah rantai tugas diperpanjang, prediksi akan menumpuk dan tindakan mencari ruang akan berkembang dengan cepat。
Perkenalan
FOKUS PENELITIAN MODEL DUNIA DALAM BEBERAPA TAHUN TERAKHIR AWALNYA PADA MANIFESTASI PEMBELAJARAN DAN PROYEKSI MASA DEPAN. MODEL MEMAHAMI DUNIA DAN KEMUDIAN MENDORONG UNTUK MASA DEPAN. RUTE INI TELAH MENGHASILKAN SATU SET PERWAKILAN HASIL. V-JEPA 2Arsitektur Prediktif Titik Video 2- Meta meluncurkan model video dunia pada tahun 2025) dengan lebih dari 1 juta jam pelatihan video Internet, dikombinasikan dengan sejumlah kecil data interaktif robot, menunjukkan potensi model dunia untuk memahami, memprediksi dan nol contoh perencanaan robot。
Tapi model memprediksi bahwa itu tidak akan sama dengan misi panjang. Dihadapkan dengan beberapa tahap kontrol, sistem biasanya menghadapi dua tekanan. Pertama adalah akumulasi yang berkelanjutan dari galat prediksinya dalam peluncuran panjang (latihan multi- step terus menerus), menghasilkan kerentanan dari seluruh path untuk menargetkan penyimpangan. Lain adalah ekspansi cepat dari ruang pencarian operasional dengan pertumbuhan cakrawala, yang menyebabkan terus meningkatkan biaya perencanaan. Alih-alih menulis ulang rute pembelajaran bawah model dunia, HWM telah menambahkan struktur perencanaan berlapis ke model dunia dengan kondisi aksi di tempat, memungkinkan sistem untuk mengatur jalur fase sebelum memproses aksi lokal。
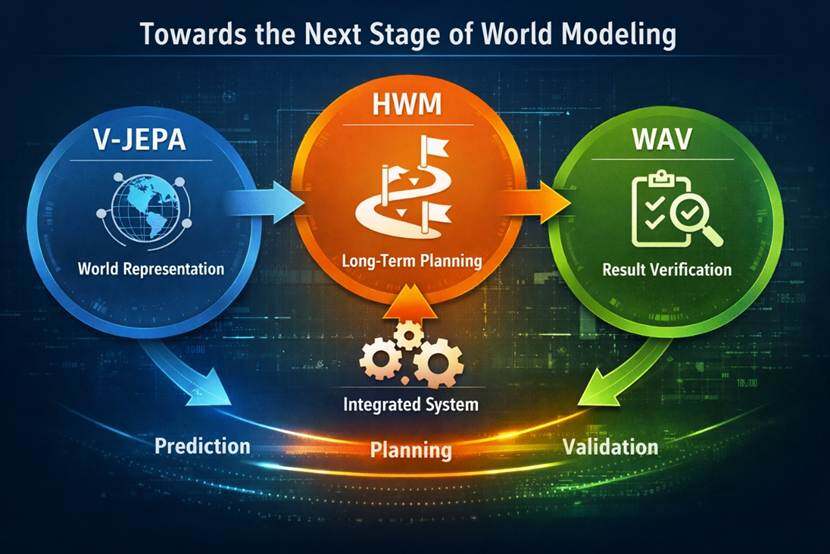
Secara teknis, V-JEPA 2 (https: / / ai.meta.com / search / vjepa /) lebih suka representasi dunia dan dasar proyeksi, HWM lebih suka perencanaan jangka panjang, WAVRencana Aksi Dunia: Self - Menimbulkan Model Dunia melalui Forward- Inverse Asimetrihttps: / / arxiv.org / abs / 2604.01985) model yang lebih bias mengidentifikasi dan memodifikasi prediksi mereka sendiri. tiga garis secara bertahap menyusut. fokus dunia pemodelan penelitian telah bergeser dari prediksi belaka masa depan untuk transformasi kemampuan prediktif ke penerapan, reverable, diverifikasi kemampuan sistem。
I. Mengapa kontrol jangka panjang tetap bottleneck dalam model dunia
kesulitan mengendalikan jangka panjang lebih mudah untuk melihat dalam misi robot. menggunakan operasi lengan mekanis, misalnya, cangkir disita dan dimasukkan ke dalam laci, yang tidak satu gerakan pun, tapi urutan langkah. sistem ini untuk mendekati objek, menyesuaikan sikap, menyelesaikan penangkapan, pindah ke posisi sasaran, memproses kembali laci dan menempatkan mereka. setelah rantai panjang, kedua masalah timbul secara bersamaan. di satu sisi, diperkirakan kesalahan akan menumpuk sepanjang peluncuran dan di sisi lain, ruang pencarian gerak akan berkembang dengan cepat。
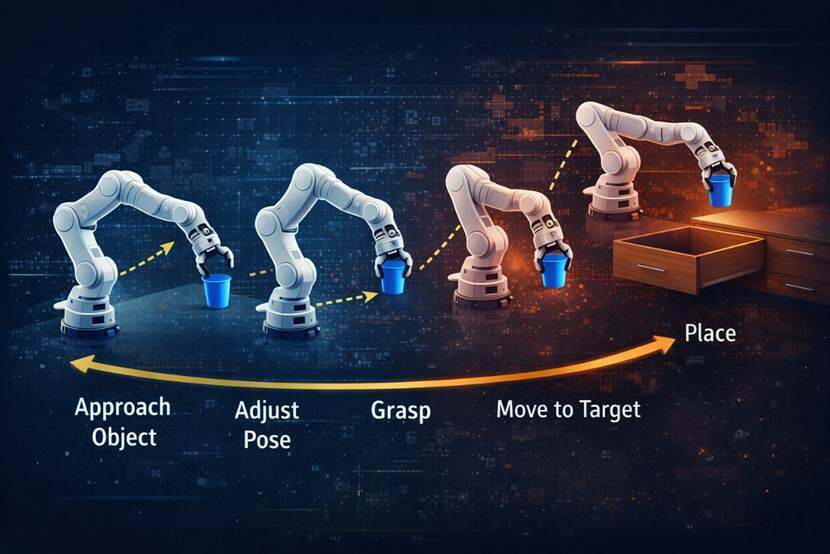
Apa yang kurang dalam sistem seringkali bukan kemampuan untuk proyek lokal, tetapi kemampuan untuk mengatur target jangka panjang menjadi tahap. Banyak tindakan, yang jelas menyimpang dari target, pada kenyataannya langkah antar diperlukan untuk mencapai tujuan. Misalnya, Anda mengangkat tangan Anda sebelum Anda mengambilnya, Anda kembali sedikit sebelum Anda membuka laci Anda dan Anda menyesuaikan sudut Anda。
Dalam misi demonstrasi, model dunia sudah menyediakan prediksi yang konsisten. Tetapi ketika kita memasuki adegan kontrol nyata, kinerja mulai menurun, dan masalah mengikuti. Tekanan datang tidak hanya dari tanda-tanda sendiri, tetapi juga dari tingkat perencanaan。
HWM CARA MEMBENTUK ULANG PROSES PERENCANAAN
HWM MEMBAGI TINGKAT ASLI DARI PROSES PERENCANAAN MENJADI DUA LAPISAN. BAGIAN ATAS BERTANGGUNG JAWAB UNTUK ARAH TAHAP PADA SKALA WAKTU YANG LEBIH PANJANG DAN YANG LEBIH RENDAH BERTANGGUNG JAWAB UNTUK EKSEKUSI PARSIAL PADA SKALA WAKTU YANG LEBIH PENDEK. MODEL INI TIDAK DIRENCANAKAN PADA SATU IRAMA, TETAPI PADA DUA IRAMA YANG BERBEDA WAKTU。
Ketika sebuah lapis tunggal menangani tugas panjang, pencarian langsung dari seluruh rantai aksi biasanya dibutuhkan di ruang aksi bawah. Semakin lama misi, semakin tinggi biaya pencarian, semakin mudah prediksi kesalahan akan menyebar sepanjang beberapa langkah gulung. Setelah proses HWM break- up, bagian atas menangani hanya pilihan rute pada skala waktu yang lebih panjang, menangani lebih rendah hanya penyelesaian dari bagian saat ini bergerak, dan seluruh panjang tugas rusak menjadi beberapa tugas yang lebih pendek, mengurangi kompleksitas perencanaan
Ada juga sebuah desain kunci di mana aksi tingkat tinggi tidak hanya merupakan catatan perbedaan antara dua negara bagian, melainkan sebuah koder yang memampatkan aksi tingkat rendah menjadi aksi tingkat tinggi. Untuk misi yang panjang, kuncinya bukan hanya berapa banyak perbedaan antara titik awal dan titik akhir, tapi juga bagaimana langkah perantara terorganisir. Tingkat-tinggi dapat dengan mudah kehilangan informasi jalur dalam rantai aksi ini jika mereka hanya melihat pergeseran。
HWM MENCERMINKAN PENDEKATAN HIRARKI KE ORGANISASI TUGAS. DALAM MENGHADAPI PROSES MULTI- PHASED, SISTEM TIDAK LAGI MELAKSANAKAN SEMUA TINDAKAN DALAM MODE SATU WAKTU, MULAI DENGAN JALUR FASE LEBIH MENTAH, DIIKUTI OLEH PARLEMEN - PARAGRAF IMPLEMENTASI DAN AMANDEMEN. KETIKA HIRARKI INI MEMASUKI MODEL DUNIA, KAPASITAS PREDIKTIF MULAI MENJADI LEBIH TERUS BERUBAH MENJADI KAPASITAS PERENCANAAN。
III. Dari 0% ke 70%, apa hasilnya menunjukkan
Di dunia nyata ditangkap dan ditempatkan tugas-tugas ditetapkan di koran, sistem diberikan hanya akhir istilah target dan tidak menyediakan artifisial dilepas target menengah. Dalam kondisi seperti ini, tingkat keberhasilan HWM adalah 70 persen, sedangkan tingkat keberhasilan model dunia tunggal adalah 0 persen. Tugas-tugas jangka panjang yang hampir mustahil untuk dicapai, dengan pengenalan perencanaan berpangkat, telah menjadi hasil yang dapat dicapai。

Kertas juga diuji simulasi seperti operasi objek push dan navigasi labirin. Hasilnya menunjukkan bahwa perencanaan yang berpantang tidak hanya meningkatkan tingkat keberhasilan tetapi juga mengurangi biaya fase perencanaan. Biaya fase perencanaan di beberapa lingkungan dapat dikurangi menjadi maksimum sekitar seperempat, sambil mempertahankan tingkat keberhasilan yang lebih tinggi atau sebanding。
IV
V-JEPA 2 mewakili jalur dunia. V-JEPA 2 pre-training dengan lebih dari 1 juta jam video internet, dikombinasikan dengan kurang dari 62 jam video robotic untuk post -pre-training pelatihan sasaran, untuk memperoleh model dunia untuk pemahaman, memprediksi dan merencanakan dunia fisik. Ini menunjukkan bahwa model dapat mendapatkan tanda-tanda dunia melalui pengamatan skala besar dan migrasi mereka untuk perencanaan robot。
HWM BERIKUTNYA. MODEL SUDAH MEMILIKI REPRESENTASI DUNIA DAN DASAR KEMAMPUAN MEMPERKIRAKAN, TETAPI SETELAH MEREKA MEMASUKI BEBERAPA TAHAP KONTROL, MASALAH AKUMULASI KESALAHAN DAN EKSPANSI RUANG ANGKASA PENCARIAN MELETUS. HWM TIDAK MENGUBAH EKSPRESI BAWAH DARI RUTE BELAJAR, MELAINKAN MENGGABUNGKAN STRUKTUR PERENCANAAN MULTI- TIMESCALE BERDASARKAN MODEL DUNIA DENGAN KONDISI AKSI. INI MENGATASI PERTANYAAN BAGAIMANA MODEL MEMBENTUK SET INTERMEDIATE LANGKAH-LANGKAH UNTUK BERGERAK MAJU PADA SEBUAH PARAGRAF-OLEH-PARAGRAF。
WAV, UNTUK BAGIANNYA, LEBIH LANJUT FOKUS PADA KAPASITAS SERTIFIKASI. MODEL DUNIA, YANG BERUSAHA UNTUK BERGERAK MENJADI OPTIMASI TAKTIS DAN SKENARIO PENYEBARAN, TIDAK HANYA DAPAT MEMPREDIKSI, TETAPI JUGA MENDETEKSI DAN DAERAH YANG BENAR DI MANA RENTAN TERHADAP DISTORSI. HAL INI PRIHATIN TENTANG BAGAIMANA MODEL MEMERIKSA SENDIRI。
V-JEPA BIAS TERHADAP REPRESENTASI DUNIA, HWM BIAS TERHADAP PERENCANAAN MISI, WAV BIAS TERHADAP HASIL. TIGA BERBEDA, TETAPI DALAM ARAH YANG SAMA. TAHAP BERIKUTNYA DARI MODEL DUNIA TIDAK LAGI HANYA PERKIRAAN INTERNAL, TETAPI KEMAMPUAN SISTEM UNTUK MEMPREDIKSI, RENCANA DAN VALIDASI。
V. Pindah dari proyeksi internal ke sistem yang dapat diterapkan
Banyak pekerjaan pemodelan dunia di masa lalu telah lebih dekat untuk meningkatkan kelanjutan prediksi negara masa depan atau meningkatkan stabilitas manifestasi dunia internal. Namun, fokus penelitian saat ini telah mulai berubah, dan sistem perlu berevolusi baik menjadi penghakiman lingkungan dan tindakan dan untuk melanjutkan merevisi langkah berikutnya setelah hasil tersedia. Untuk lebih dekat dengan penyebaran nyata, diperlukan untuk mengontrol penyebaran kesalahan dalam misi jarak jauh, untuk menekan jangkauan pencarian dan mengurangi biaya penalaran。
Perubahan ini juga mempengaruhi AI anent. Banyak sistem agen telah mampu melakukan tugas pendek-link, seperti perangkat panggilan, membaca dokumen dan menerapkan beberapa instruksi langkah. Namun, setelah tugas menjadi rantai panjang, multi- phased satu membutuhkan perantara perencanaan, penurunan kinerja. Hal ini tidak berbeda secara fundamental dari kesulitan pengendalian robot, tetapi kurangnya kapasitas organisasi jalur tinggi, menyebabkan pemenggalan antara implementasi lokal dan tujuan keseluruhan。
PENDEKATAN HIRARKIS YANG DISEDIAKAN OLEH HWM, DENGAN TANGGUNG JAWAB SENIOR UNTUK JALUR DAN TUJUAN PANGGUNG, TANGGUNG JAWAB YANG LEBIH RENDAH UNTUK PEMROSESAN AKSI DAN UMPAN BALIK LOKAL, DAN VALIDASI HASIL TAMBAHAN, AKAN TERUS MUNCUL DALAM LEBIH BANYAK SISTEM DI MASA DEPAN. DALAM FASE BERIKUTNYA DARI MODEL DUNIA, FOKUS TIDAK LAGI HANYA PADA MEMPREDIKSI MASA DEPAN, TETAPI PADA PENGORGANISASIAN PREDIKSI, IMPLEMENTASI DAN REVISI KE DALAM PATH FUNGSIONAL。
