MODEL-MODEL DUNIA DARI MODEL MODEL DUNIA DARI PREDIKSI KE PERENCANAAN, HWM DAN TANTANGAN KONTROL JARAK JAUH
Hari 3 April, NYU dan tim FAIR Meta menerbitkan makalah Hierarki Perencanaan dengan Akhir Model Dunia (HWM). Alamat asli: (https://arxiv.org/abs/2604.03208) Makalah itu tidak terus berfokus pada menghasilkan gambaran yang lebih realistis tentang masa depan, tetapi sebaliknya beralih ke tantangan implementasi yang sudah lama berdiri dari model dunia. Setelah rantai tugas diperpanjang, prediksi akan menumpuk dan aksi pencarian ruang akan berkembang dengan cepat。
Pengantar Kata Pengantar
PENELITIAN YANG BERFOKUS PADA MODEL DUNIA PADA TAHUN - TAHUN BELAKANGAN INI PADA AWALNYA PADA MANIFESTASI PEMBELAJARAN DAN PROYEKSI MASA DEPAN. MODEL MEMAHAMI DUNIA DAN KEMUDIAN MENDORONG UNTUK MASA DEPAN. RUTE INI TELAH MENGHASILKAN SET HASIL PERWAKILAN. V-JEPA 2Artefek Predikatif Arsitektur 2Meta — Meta meluncurkan model dunia video pada tahun 2025) dengan lebih dari 1 juta jam pra-latihan video Internet, dikombinasikan dengan sejumlah kecil data interaktif robotik, menunjukkan potensi model dunia untuk pemahaman, prediksi dan nol sampel perencanaan robotik。
Tapi model memprediksi bahwa itu tidak akan sama dengan misi panjang. Sistem ini biasanya menghadapi dua tekanan. Salah satunya adalah akumulasi terus dari kesalahan yang diprediksi dalam rollout panjang (sebuah latihan multi-langkah terus menerus), mengakibatkan meningkatnya kerentanan seluruh jalur ke penyimpangan target. Ekspansi lainnya adalah perluasan ruang pencarian operasional yang pesat dengan pertumbuhan horizon, mengarah untuk terus meningkat dalam perencanaan biaya. Alih-alih menulis ulang rute pembelajaran bawah model dunia, HWM telah menambahkan struktur perencanaan berlapis ke model dunia dengan kondisi aksi di tempat, memungkinkan sistem untuk mengatur jalur fase sebelum memproses tindakan lokal。
Secara teknis, V-JEPA 2 (https://ai.meta.com/research/vjepa/) lebih menyukai representasi dunia dan proyeksi dasar, HWM lebih memilih perencanaan jangka panjang, WAVRencana Aksi Dunia Ukiran: Improvisasi diri Model Dunia melalui Asimetri Forward-Inversehttps://arxiv.org/abs/2604.01985) model-model yang lebih bias mengidentifikasikan dan memodifikasi prediksi mereka sendiri. jalur ketiga secara bertahap menyusut. fokus penelitian pemodelan dunia telah bergeser dari prediksi masa depan semata-mata ke transformasi kemampuan prediktif menjadi kemampuan sistem yang dapat dilaksanakan, reversibel, dapat diverifikasi。
Mengapa kontrol jangka panjang tetap berbobot dalam model dunia
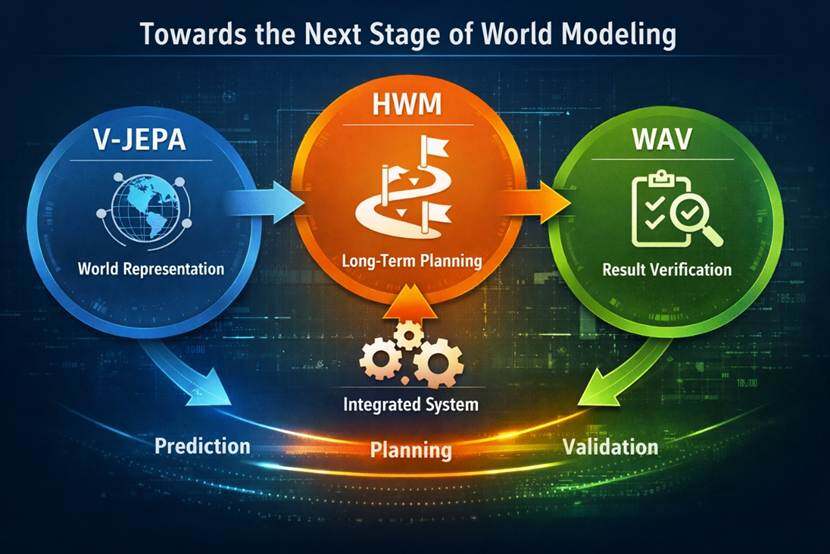
kesulitan kontrol jangka panjang lebih mudah dilihat dalam misi robot. sebagai contoh, menggunakan tangan mekanis, sebuah cangkir disita dan dimasukkan ke dalam laci, yang bukan satu gerakan, melainkan urutan langkah. sistem ini adalah untuk mendekati objek, menyesuaikan sikap, melengkapi penangkapan, pindah ke posisi target, memproses ulang laci dan menempatkan mereka. setelah rantai panjang, kedua masalah muncul secara bersamaan. di satu sisi, kesalahan yang diprediksi akan terkumpul sepanjang rollout dan di sisi lain, ruang pencarian gerak akan berkembang dengan cepat。
Apa yang kurang dalam sistem sering bukan kemampuan untuk memproyeksikan secara lokal, tetapi kemampuan untuk mengatur target jarak jauh ke dalam tahap. Banyak tindakan, yang secara lokal menyimpang dari target, sebenarnya adalah langkah menengah yang diperlukan untuk mencapai tujuan. Sebagai contoh, Anda mengangkat lengan Anda sebelum Anda mengambilnya, Anda berbalik sedikit sebelum Anda membuka laci dan Anda menyesuaikan sudut Anda。
Dalam misi demonstrasi, model dunia sudah menyediakan prediksi yang konsisten. Tetapi ketika kita memasuki adegan kontrol nyata, kinerja mulai menurun, dan masalah mengikuti. Tekanan penyakit tidak hanya berasal dari tanda-tanda itu sendiri, tetapi juga dari tingkat perencanaan。
II. HWM CARA REKONSTRUKSI PROSES PERENCANAAN
GHWM MEMBELAH TINGKAT AWAL PROSES PERENCANAAN MENJADI DUA LAPISAN. ATASAN ADALAH BERTANGGUNG JAWAB UNTUK ARAH TAHAP PADA SKALA WAKTU YANG LEBIH PANJANG DAN YANG LEBIH RENDAH BERTANGGUNG JAWAB UNTUK EKSEKUSI PARSIAL PADA SKALA WAKTU YANG LEBIH PENDEK. MODEL INI TIDAK DIRENCANAKAN PADA SATU IRAMA, TETAPI PADA DUA RITME WAKTU YANG BERBEDA。
Saat lapisan tunggal menangani tugas panjang, pencarian langsung seluruh rantai aksi biasanya diperlukan di ruang aksi bawah. Lebih lama misi, semakin tinggi biaya pencarian, semakin mudah kesalahan prediksi akan menyebar di sepanjang beberapa langkah rollout. Setelah proses pemutusan HWM, top menangani hanya pemilihan rute pada skala waktu yang lebih panjang, yang lebih rendah hanya menangani penyelesaian bagian saat ini dari gerakan, dan seluruh tugas panjang dipecah menjadi beberapa tugas yang lebih pendek, mengurangi kompleksitas perencanaan
Ada juga desain kunci di mana tindakan tingkat tinggi bukan sekadar catatan perbedaan antara dua negara bagian, tetapi lebih kepada koder yang memadatkan aksi tingkat bawah ke dalam aksi tingkat lebih tinggi. Untuk misi yang panjang, kunci tidak hanya berapa banyak perbedaan antara titik awal dan titik akhir, tetapi juga bagaimana langkah intermediate terorganisir. Level-level tinggi ifley dapat dengan mudah kehilangan informasi jalur dalam rantai aksi ini jika mereka hanya melihat pergeseran。
HWM MENCERMINKAN PENDEKATAN HIERARKIS TERHADAP ORGANISASI TUGAS. DALAM MENGHADAPI PROSES MULTI-FASED, SISTEM TIDAK LAGI MENJALANKAN SEMUA TINDAKAN DALAM MODE SATU KALI, DIMULAI DENGAN JALUR FASE YANG LEBIH MENTAH, DIIKUTI DENGAN IMPLEMENTASI PARAGRAF-OLEH-PARAGRAF DAN AMENDEMEN. KETIKA HIERARKI INI MEMASUKI MODEL DUNIA, KAPASITAS PREDIKTIF MULAI LEBIH TERUS BERUBAH MENJADI KAPASITAS PERENCANAAN。
/ III. Dari 0% sampai 70%, apa hasilnya
Di dunia nyata ditangkap dan ditempatkan tugas-tugas yang ditetapkan di koran, sistem hanya diberikan istilah target akhir dan tidak menyediakan target intermediate yang terpisah secara artifisial. Di bawah kondisi ini, tingkat keberhasilan HWM adalah 70 persen, sementara tingkat keberhasilan model dunia satu lapis adalah 0 persen. Tugas jangka panjang yang hampir mustahil dicapai, dengan diperkenalkannya perencanaan mengikat, telah menjadi hasil yang dapat dicapai。

Koran ini juga menguji simulasi seperti mendorong operasi objek dan navigasi labirin. Hasil ini menunjukkan bahwa perencanaan dasid tidak hanya meningkatkan tingkat keberhasilan tetapi juga mengurangi biaya tahap perencanaan. Pengeluaran fase perencanaan di beberapa lingkungan dapat dikurangi menjadi maksimum sekitar seperempat, sementara mempertahankan tingkat keberhasilan yang lebih tinggi atau sebanding。
DARI V-JEPA KE HWM KE WAV
V-JEPA 2 melambangkan jalan dunia. Wachida V-JEPA 2 pra-latihan dengan lebih dari 1 juta jam video Internet, dikombinasikan dengan kurang dari 62 jam video robot untuk pasca-pelatihan target pelatihan, untuk mendapatkan model dunia untuk pemahaman, memprediksi dan merencanakan dunia fisik. Ini menunjukkan bahwa model dapat memperoleh tanda dunia melalui pengamatan skala besar dan bermigrasi ke perencanaan robot。
HWM BERIKUTNYA. MODEL-MODEL TELAH MEMILIKI REPRESENTASI DUNIA DAN KEMAMPUAN RAMALAN DASAR, TETAPI SETELAH MEREKA MEMASUKI BERBAGAI TAHAP KONTROL, MASALAH AKUMULASI KESALAHAN DAN EKSPANSI RUANG PENCARIAN MELETUS. WWM TIDAK MENGUBAH EKSPRESI BAWAH DARI JALUR PEMBELAJARAN, TETAPI SEBALIKNYA MENGGABUNGKAN STRUKTUR PERENCANAAN SKALA MULTI-WAKTU BERDASARKAN MODEL DUNIA DENGAN KONDISI AKSI. INI MEMBAHAS PERTANYAAN BAGAIMANA MODEL MEMBENTUK SATU SET LANGKAH MENENGAH UNTUK BERGERAK MAJU PADA SEBUAH PARAGRAF-OLEH-PARAGRAF DASAR。
WAVAV, UNTUK BAGIANNYA, LEBIH FOKUS PADA KAPASITAS SERTIFIKASI. MODEL DUNIA, YANG BERUSAHA UNTUK BERGERAK KE SEBUAH OPTIMASI TAKTIS DAN PENYEBARAN SKENARIO, TIDAK HANYA DAPAT MEMPREDIKSI, TETAPI JUGA MENDETEKSI DAN MEMPERBAIKI DAERAH DI MANA IA RENTAN TERHADAP DISTORSI. IA PRIHATIN TENTANG BAGAIMANA MODEL MEMERIKSA DIRI MEREKA SENDIRI。
\"V-JEPA\" BIAS TERHADAP PERWAKILAN DUNIA, HWM BIAS TERHADAP PERENCANAAN MISI, WAV BIAS TERHADAP HASIL. KETIGANYA BERBEDA, TAPI KE ARAH YANG SAMA. FASE BERIKUTNYA MODEL DUNIA BUKAN LAGI HANYA RAMALAN INTERNAL, TETAPI KEMAMPUAN SISTEM UNTUK MEMPREDIKSI, MERENCANAKAN DAN MEMVALIDASI。
Bergerak dari proyeksi internal ke sistem yang dapat diterapkan
Banyak dari dunia ' s modelling pekerjaan di masa lalu telah lebih dekat untuk meningkatkan kontinuitas prediksi negara masa depan atau meningkatkan stabilitas manifestasi dunia internal. Namun, fokus studi saat ini telah mulai berubah, dan sistem perlu berkembang baik menjadi penilaian lingkungan dan menjadi tindakan dan untuk terus merevisi langkah berikutnya setelah hasilnya tersedia. Untuk lebih dekat dengan penyebaran nyata, perlu untuk mengontrol penyebaran kesalahan dalam misi jarak jauh, untuk memampatkan jangkauan pencarian dan untuk mengurangi biaya penalaran。
Perubahan ini juga mempengaruhi anent. Banyak sistem agen agen-agen telah mampu melakukan tugas-tugas short-link, seperti alat pemanggilan, membaca dokumen dan melaksanakan beberapa instruksi langkah. Namun, setelah tugas menjadi rantai panjang, multi-fased salah satu membutuhkan intermediate re-planning, penurunan kinerja. Hal ini tidak secara mendasar berbeda dari kesulitan pengendalian robotik, tetapi adalah kurangnya kapasitas organisasi jalur tingkat tinggi, mengarah ke pemutusan antara implementasi lokal dan tujuan keseluruhan。
PENDEKATAN HIERARKIS YANG DISEDIAKAN OLEH HWM, DENGAN TANGGUNG JAWAB SENIOR UNTUK TUJUAN JALUR DAN TAHAP, TANGGUNG JAWAB YANG LEBIH RENDAH UNTUK TINDAKAN LOKAL DAN PEMROSESAN UMPAN BALIK, DAN VALIDASI TAMBAHAN HASIL, AKAN TERUS MUNCUL DALAM LEBIH BANYAK SISTEM DI MASA DEPAN. PADA FASE MODEL DUNIA BERIKUTNYA, FOKUSNYA TIDAK LAGI HANYA UNTUK MEMPREDIKSI MASA DEPAN, TETAPI UNTUK MENGATUR PREDIKSI, IMPLEMENTASI DAN REVISI MENJADI JALUR FUNGSIONAL。
