โมเดลโลกย้ายจากคําทํานายไปวางแผน HWM และความท้าทายการควบคุมระยะไกล
3 April, NYU และทีมเมต้า เอฟเอไออาร์ ได้ตีพิมพ์งานด้านการวางแผนการวางจําหน่ายกระดาษ ด้วยรุ่นล่าสุดของโลก (HWM). ที่อยู่เดิม: (httpss/karxiv.org/abs/2604.03208) หนังสือพิมพ์ไม่ได้มุ่งเน้นไปที่ การสร้างภาพในอนาคตที่สมจริงขึ้น แต่หันไปหาความท้าทายในการใช้งานที่ยาวนาน ของแบบจําลองโลก เมื่อห่วงโซ่งานถูกยืดยาว คําทํานายจะสะสมและพื้นที่ปฏิบัติการจะขยายตัวอย่างรวดเร็ว。
แนะนํา
การ วิจัย ที่ เน้น เรื่อง แบบ จําลอง โลก ใน ช่วง ไม่ กี่ ปี มา นี้ เริ่ม ต้น เกี่ยว กับ การ แสดง ออก ซึ่ง การ เรียน รู้ และ การ คาด คะเน ใน อนาคต. แบบจําลองเข้าใจโลก และผลักดันไปสู่อนาคต เส้น ทาง นี้ ทํา ให้ เกิด ผล ที่ ดี สําหรับ ตัว แทน. V-JEPA 2สถาปัตยกรรม ที่ กําหนด ไว้ ล่วง หน้า 2— เมต้าเปิดตัวโมเดลโลกใน 2025) โดยมีวิดีโอโทรทัศน์กว่า 1 ล้านชั่วโมง ก่อนฝึกล่วงหน้า โดยรวมเข้ากับข้อมูลระบบสื่อสารหุ่นยนต์ขนาดเล็ก。
แต่โมเดลทํานายว่ามันจะไม่เหมือนภารกิจที่ยาวนาน เมื่อ เผชิญ กับ การ ควบคุม หลาย ขั้น ตอน ระบบ มัก เผชิญ กับ ความ กดดัน สอง อย่าง. ข้อแรกคือ การรวมความผิดพลาดที่คาดการณ์ไว้อย่างต่อเนื่องในระยะยาว (การออกกําลังกายหลายขั้นตอนอย่างต่อเนื่อง) ส่งผลให้ยิ่งอ่อนแอมากขึ้น อีก อย่าง หนึ่ง คือ การ ขยาย ตัว อย่าง รวด เร็ว ของ พื้น ที่ ใน การ เสาะ หา เพื่อ การ ดําเนิน งาน พร้อม กับ การ เติบโต ของ ขอบ ฟ้า ทํา ให้ ค่า ใช้ จ่าย ใน การ วาง แผน เพิ่ม ขึ้น เรื่อย ๆ. แทนที่จะเขียนเส้นทางการเรียนรู้ด้านล่างนี้ ของโมเดลโลก HWM ได้เพิ่มโครงสร้างการวางแผนแบบชั้น ๆ เข้ากับโมเดลโลก พร้อมเงื่อนไขการกระทํา ในตําแหน่ง。
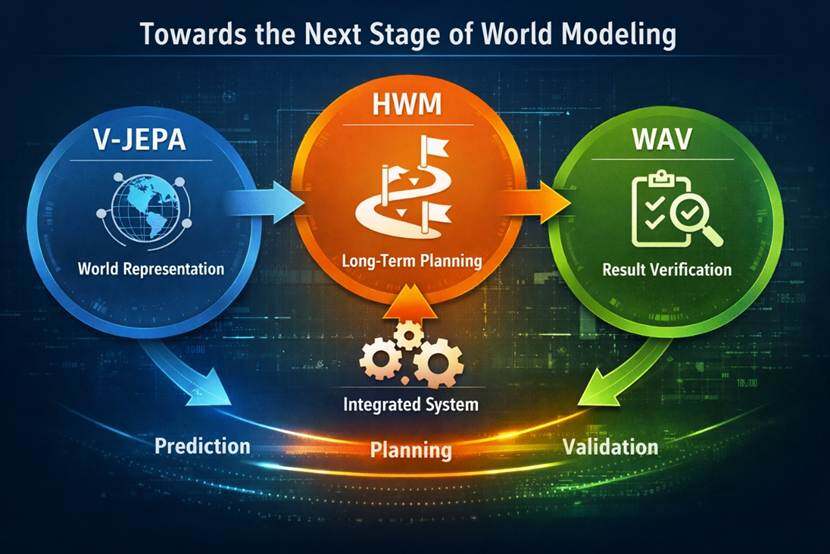
ทางเทคนิคแล้ว V-JEPA 2 (httpsi.meta.com/resesearch/vjapa/) ชอบตัวแทนโลกและการฉายภาพฐาน HWM ชอบการวางแผนระยะยาว WAVแผน ปฏิบัติ การ ของ โลก:https/karxiv.org/abs/2604.01985) แบบ จําลอง ที่ มี อคติ มาก ขึ้น ระบุ และ แก้ไข คํา ทํานาย ของ ตน เอง. สามบรรทัดค่อยๆหดตัวลง ความสนใจของงานวิจัยจําลองโลก ได้เปลี่ยนจาก การคาดการณ์ถึงอนาคต ไปเป็นการเปลี่ยนแปลง。
ไอ. ทําไมการควบคุมระยะยาวยังคงเป็นคอขวดในแบบจําลองโลก
ความยากของการควบคุมระยะยาว มันง่ายกว่าที่จะเห็นในภารกิจหุ่นยนต์ ตัว อย่าง เช่น โดย ใช้ การ ผ่าตัด แขน กล มี การ ยึด จอก ใบ หนึ่ง และ ใส่ ไว้ ใน ลิ้นชัก ซึ่ง ไม่ ใช่ การ เดิน แบบ เดียว แต่ เป็น การ เดิน ตาม ลําดับ ขั้น. ระบบจะเข้าหาวัตถุ ปรับทัศนคติ จับภาพให้สมบูรณ์ ย้ายไปยังตําแหน่งเป้าหมาย เมื่อห่วงโซ่ยาว ปัญหาทั้งสองเกิดขึ้นพร้อมกัน ใน ด้าน หนึ่ง ความ ผิด ที่ คาด การณ์ ไว้ จะ สะสม ไว้ ตาม ทาง กลิ้ง และ อีก ด้าน หนึ่ง ก็ จะ มี การ ค้น หา อย่าง รวด เร็ว。
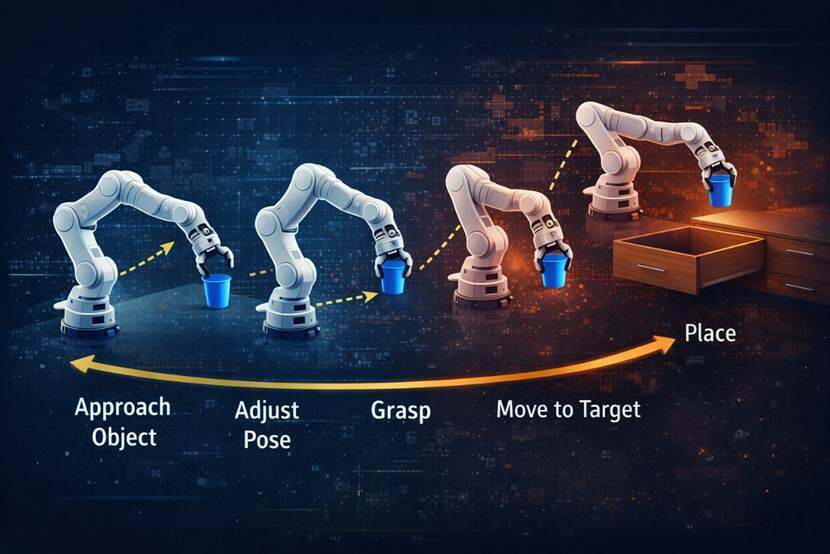
สิ่งที่ขาดไปในระบบ มักจะไม่ใช่ความสามารถในการ โปรเจกต์ในท้องถิ่น แต่ความสามารถในการจัดการ เป้าหมายระยะไกลในขั้นตอน การ กระทํา หลาย อย่าง ซึ่ง อยู่ ห่าง จาก เป้า หมาย ใน ท้อง ถิ่น นั้น จริง ๆ แล้ว เป็น ขั้น ตอน กลาง ที่ จําเป็น เพื่อ บรรลุ เป้า หมาย. ตัว อย่าง เช่น คุณ ยก แขน ขึ้น ก่อน จะ รับ มัน คุณ จะ หัน หลัง ให้ มัน เล็ก น้อย ก่อน จะ เปิด ลิ้นชัก และ ปรับ มุม。
ในภารกิจสาธิต แบบจําลองโลก ได้ให้คําทํานายที่สอดคล้องกันแล้ว แต่เมื่อเราเข้าสู่ฉากควบคุมที่แท้จริง ประสิทธิภาพจะเริ่มลดลง และปัญหาตามมา ความ กดดัน ไม่ เพียง แต่ มา จาก หมาย สําคัญ แต่ มา จาก ระดับ การ วาง แผน ด้วย。
II. HWM วิธีปรับโครงสร้างกระบวนการการวางแผนใหม่
HWM จะแยกระดับดั้งเดิมของกระบวนการวางแผนออกเป็นสองชั้น ส่วน บน ต้อง รับ ผิด ชอบ ต่อ การ ชี้ นํา ของ เวที ใน ระดับ เวลา ที่ ยาว กว่า และ ส่วน ล่าง ต้อง รับ ผิด ชอบ ต่อ การ ประหาร บาง ราย ใน ช่วง เวลา สั้น ๆ. ไม่ มี การ วาง แผน ใน จังหวะ เดียว แต่ ใช้ จังหวะ เวลา สอง จังหวะ ต่าง กัน。
เมื่อชั้นเดี่ยวจัดการงานยาวการค้นหาโดยตรงของห่วงโซ่การกระทําทั้งหมด มักจําเป็นในพื้นที่การกระทําด้านล่าง ยิ่ง ภารกิจ นาน เท่า ไร ค่า ใช้ จ่าย ใน การ ค้น หา ก็ ยิ่ง ง่าย ที่ การ ทํานาย จะ แพร่ กระจาย ไป ตาม ขั้น ตอน ต่าง ๆ. หลังจากกระบวนการแยก HWM แล้ว, การจับด้านบนเฉพาะการเลือกเส้นทางที่ยาวขึ้น, การจับที่ด้านล่างเฉพาะส่วนปัจจุบันของการเคลื่อนไหวเท่านั้น และงานยาวทั้งหมดถูกแบ่งออกเป็นงานที่สั้นกว่าหลาย, การลดความซับซ้อนของการวางแผน
นอกจากนี้ยังมีการออกแบบที่สําคัญ ที่การกระทําระดับสูงไม่ได้เป็นเพียง บันทึกความแตกต่างระหว่างรัฐทั้งสอง แต่เป็นตัวเข้ารหัสที่บีบ สําหรับภารกิจอันยาวนาน กุญแจไม่ได้มีแต่จะแตกต่างกันไป ระหว่างจุดเริ่มต้นกับจุดจบ ระดับสูงสามารถสูญเสียข้อมูลเส้นทางได้อย่างง่ายดาย ในห่วงโซ่การกระทํานี้ ถ้าพวกเขาดูเฉพาะการเลื่อน。
เอชดับเบิลยูเอ็ม สะท้อนให้เห็นถึง วิธีจัดการงานแบบลําดับชั้น ในใบหน้าของกระบวนการหลายเหลี่ยม ระบบไม่ได้ดําเนินการออกทั้งหมด ในรูปแบบครั้งเดียว เริ่มด้วยเส้นทางหยาบมากขึ้น เมื่อ ลําดับ ชั้น นี้ เข้า มา ใน แบบ จําลอง โลก ความ สามารถ ใน การ ทํานาย เริ่ม จะ เปลี่ยน ไป เป็น ความ สามารถ ใน การ วาง แผน อย่าง ต่อ เนื่อง。
3 จาก 0% ถึง 70% ผลเป็นยังไง
ใน โลก แห่ง ความ เป็น จริง ที่ ถูก จับ และ จัด ให้ มี งาน ที่ กําหนด ไว้ ใน กระดาษ ระบบ นี้ ได้ รับ เพียง เงื่อนไข สุด ท้าย ของ เป้า หมาย และ ไม่ ได้ จัด ให้ มี การ แยก เป้า หมาย กลาง ออก จาก กัน. ภายใต้เงื่อนไขเหล่านี้ อัตราความสําเร็จของ HWM คือ 70 เปอร์เซ็นต์ ในขณะที่อัตราความสําเร็จของโมเดลโลกเดี่ยว คือ 0 เปอร์เซ็นต์ งานระยะยาวที่แทบจะเป็นไปไม่ได้ ที่จะสําเร็จได้ พร้อมกับการวางแผนแบบผูกขาด ได้กลายเป็นผลลัพธ์ที่เลี่ยงไม่ได้。

หนังสือ พิมพ์ นี้ ยัง ทดสอบ การ จําลอง ด้วย เช่น การ ปฏิบัติ งาน ของ วัตถุ ที่ ผลัก ดัน และ การ เดิน ทาง แบบ วงกต. ผล ที่ ได้ แสดง ว่า การ วาง แผน อย่าง เสมอ ต้น เสมอ ปลาย ไม่ เพียง แต่ เพิ่ม อัตรา ความ สําเร็จ เท่า นั้น แต่ ยัง ทํา ให้ ระยะ การ วาง แผน ลด ลง ด้วย. ความ เสีย หาย จาก ระยะ การ วาง แผน ใน บาง สภาพ แวด ล้อม อาจ ลด ลง เหลือ ประมาณ หนึ่ง ใน สี่ ขณะ ที่ รักษา อัตรา ความ สําเร็จ ที่ สูง กว่า หรือ เทียบ เคียง。
IV. จาก V-JEPA ถึง HWM ถึง WAV
V-JEPA 2 แสดงเส้นทางของโลก V-JEPA 2 ที่ถูกฝึกมาแล้วกว่า 1 ล้านชั่วโมงจากวิดีโออินเตอร์เนต รวมเข้ากับวิดีโอหุ่นยนต์ที่ใช้เวลาไม่เกิน 62 ชั่วโมง มันแสดงให้เห็นว่าแบบจําลองสามารถได้รับสัญญาณโลก ผ่านการสังเกตขนาดใหญ่ และย้ายพวกเขาไปยังการวางแผนหุ่นยนต์。
HWM เป็นรายต่อไป โมเดลต่างๆ มีตัวแทนของโลกอยู่แล้ว และมีความสามารถในการคาดการณ์พื้นฐาน แต่เมื่อพวกเขาเข้าสู่ระยะต่างๆ ของการควบคุม ปัญหาของการรวมความผิดพลาด และการค้นหาการขยายพื้นที่ HWM ไม่ได้เปลี่ยนการแสดงออกทางด้านล่างของเส้นทางการเรียนรู้ แต่ได้รวมโครงสร้างการวางแผนหลายระดับ มันบอกถึงคําถามว่าโมเดลนี้สร้างขั้นตอนกลางอย่างไร สําหรับการเดินหน้าต่อด้วยพื้นฐาน。
WAV สําหรับส่วนของตน โฟกัสต่อไปเกี่ยวกับความจุการสถาปนา โมเดลของโลกซึ่งพยายามย้ายเข้าสู่สถานการณ์ที่เหมาะเจาะและใช้กลยุทธ์ ที่ไม่สามารถคาดเดาได้ มันเป็นห่วงว่าแบบจําลองจะตรวจสอบตัวเองอย่างไร。
V-JEPA มีอคติต่อตัวแทนโลก เอชดับเบิลยูเอ็ม มีอคติต่อการวางแผนภารกิจ WAV มีอคติต่อผลลัพธ์ สามอย่างต่างกัน แต่ไปในทิศเดียวกัน ขั้นต่อไปของโมเดลโลก ไม่ใช่เป็นแค่การพยากรณ์ภายในอีกต่อไป แต่เป็นความสามารถของระบบที่จะคาดเดา วางแผนและตรวจสอบ。
V. การย้ายจากโปรเจคเตอร์ภายในมาใช้ในระบบ
งานจําลองภาพส่วนใหญ่ของโลกในอดีต ใกล้เคียงกับการปรับปรุงความต่อเนื่อง ของการคาดการณ์ของรัฐในอนาคต อย่างไรก็ตาม ความสนใจของการศึกษาในปัจจุบันได้เริ่มมีการเปลี่ยนแปลง และระบบต้องพัฒนาทั้งเป็นการตัดสินสิ่งแวดล้อม และเป็นการกระทํา เพื่อให้ใกล้การใช้จริงมากขึ้น จึงจําเป็นในการควบคุมการแพร่กระจายของความผิดพลาดในภารกิจระยะไกล เพื่อบีบช่วงการค้นหาและลดค่าใช้จ่ายของเหตุผล。
การ เปลี่ยน แปลง เหล่า นี้ มี ผล กระทบ ต่อ AI anent ด้วย. ระบบตัวแทนจํานวนมาก สามารถทํางานแบบสั้นได้ เช่น การเรียกเครื่องมือ การอ่านเอกสาร อย่างไรก็ตาม เมื่องานกลายเป็นห่วงโซ่ยาว, คนหลายหน้าที่เรียกร้องให้กลาง การวางแผนใหม่, ประสิทธิภาพลดลง นี่ไม่ได้แตกต่างจากความยากในการควบคุมของหุ่นยนต์ แต่เป็นการขาดความสามารถในการดําเนินงานระดับสูง。
วิธีการแบบลําดับชั้นที่นําเสนอโดย เอชดับเบิลยูเอ็ม ด้วยความรับผิดชอบอาวุโสต่อเส้นทาง และวัตถุประสงค์บนเวที ในระยะถัดไปของโมเดลโลก โฟกัสไม่ได้เป็นเพียง การทํานายอนาคต แต่ในการจัดลําดับการพยากรณ์ การจัดและการปรับปรุง。
